|
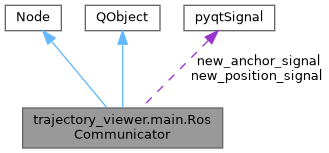
| pyqtSignal | new_position_signal = pyqtSignal(float, float, float, float, float, float) |
| |
| pyqtSignal | new_anchor_signal = pyqtSignal(float, float, float, float, float, float, float, float) |
| |
◆ __init__()
| def trajectory_viewer.main.RosCommunicator.__init__ |
( |
|
self | ) |
|
◆ marker_callback()
| def trajectory_viewer.main.RosCommunicator.marker_callback |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ odom_callback()
| def trajectory_viewer.main.RosCommunicator.odom_callback |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ publish_targets()
| def trajectory_viewer.main.RosCommunicator.publish_targets |
( |
|
self | ) |
|
◆ update_targets()
| def trajectory_viewer.main.RosCommunicator.update_targets |
( |
|
self, |
|
|
|
x, |
|
|
|
y, |
|
|
|
z, |
|
|
|
roll, |
|
|
|
yaw |
|
) |
| |
GUIから呼び出されるスロット。配信する値を更新する。
◆ new_anchor_signal
| pyqtSignal trajectory_viewer.main.RosCommunicator.new_anchor_signal = pyqtSignal(float, float, float, float, float, float, float, float) |
|
static |
◆ new_position_signal
| pyqtSignal trajectory_viewer.main.RosCommunicator.new_position_signal = pyqtSignal(float, float, float, float, float, float) |
|
static |
◆ publisher_timer
| trajectory_viewer.main.RosCommunicator.publisher_timer |
◆ sub_marker
| trajectory_viewer.main.RosCommunicator.sub_marker |
◆ subscription
| trajectory_viewer.main.RosCommunicator.subscription |
◆ target_roll_value
| trajectory_viewer.main.RosCommunicator.target_roll_value |
◆ target_x_value
| trajectory_viewer.main.RosCommunicator.target_x_value |
◆ target_y_value
| trajectory_viewer.main.RosCommunicator.target_y_value |
◆ target_yaw_value
| trajectory_viewer.main.RosCommunicator.target_yaw_value |
◆ target_z_value
| trajectory_viewer.main.RosCommunicator.target_z_value |
◆ targets_pub
| trajectory_viewer.main.RosCommunicator.targets_pub |
The documentation for this class was generated from the following file:
- src/visualizer/archive/trajectory_viewer/trajectory_viewer/main.py

 Inheritance diagram for trajectory_viewer.main.RosCommunicator:
Inheritance diagram for trajectory_viewer.main.RosCommunicator: