|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
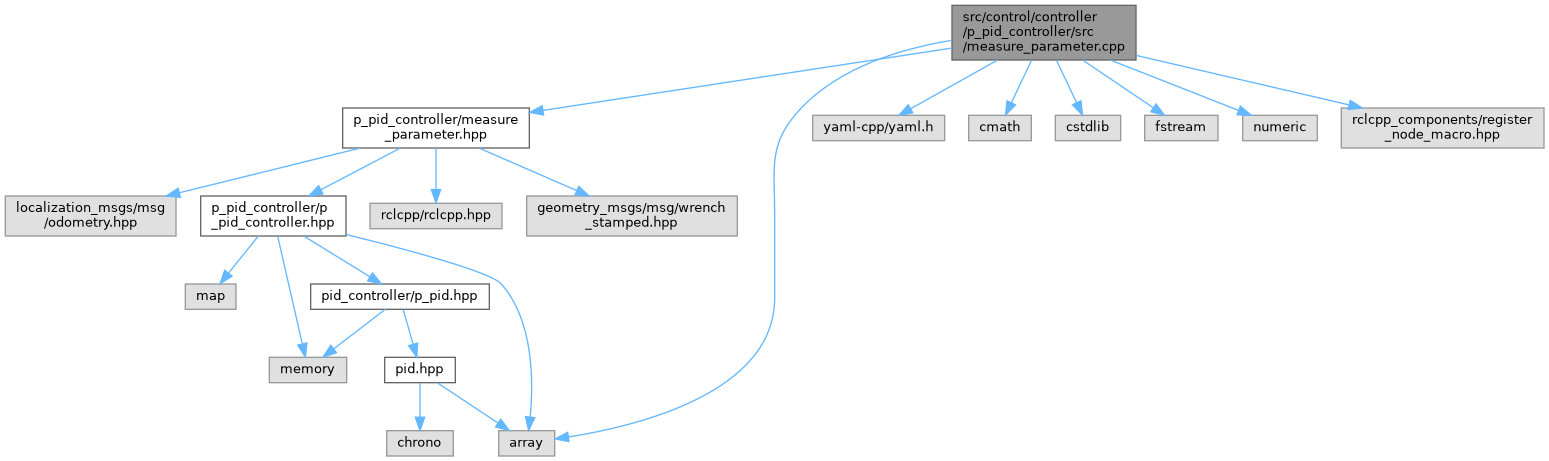
measure offset for P_PID Controller More...
#include "p_pid_controller/measure_parameter.hpp"#include <yaml-cpp/yaml.h>#include <array>#include <cmath>#include <cstdlib>#include <fstream>#include <numeric>#include "rclcpp_components/register_node_macro.hpp" Include dependency graph for measure_parameter.cpp:
Include dependency graph for measure_parameter.cpp:Namespaces | |
| namespace | controller |
| For controller. | |
measure offset for P_PID Controller
rollのモーメントとz-axisの浮力を計測する