|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
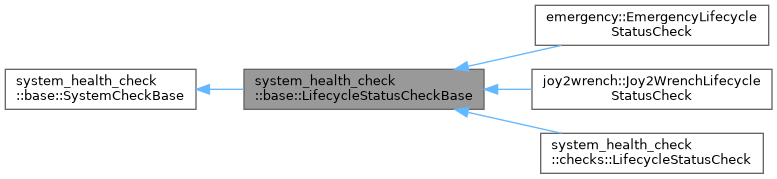
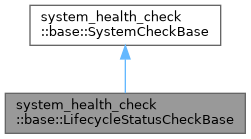
Base class for checking the state of a Lifecycle Node. Connects to the {node_name}/get_state service to verify the current state.
More...
#include <lifecycle_stats_check_base.hpp>
 Inheritance diagram for system_health_check::base::LifecycleStatusCheckBase: Collaboration diagram for system_health_check::base::LifecycleStatusCheckBase:
Inheritance diagram for system_health_check::base::LifecycleStatusCheckBase: Collaboration diagram for system_health_check::base::LifecycleStatusCheckBase:Protected Member Functions | |
| void | set_config (const std::string target_node_name, const std::string expected_state, const uint32_t timeout_ms) |
| Configuration for the check. | |
| virtual void | prepare_check (rclcpp::Node::SharedPtr node) override=0 |
| Prepares the check before execution. | |
| virtual std::string | get_unique_id () const |
| Generates a unique identifier for the check instance. | |
| virtual void | prepare_check (rclcpp::Node::SharedPtr node) |
| Prepares the check before execution. | |
| virtual bool | check_impl (rclcpp::Node::SharedPtr node)=0 |
| Actual implementation of the check logic. | |
| virtual std::string | report_impl (rclcpp::Node::SharedPtr node)=0 |
| Generates a detailed report of the check. | |
Additional Inherited Members | |
| Public Member Functions inherited from system_health_check::base::SystemCheckBase | |
| virtual | ~SystemCheckBase () |
| bool | check (rclcpp::Node::SharedPtr node) |
| Executes the system check with caching support. | |
| std::string | report (rclcpp::Node::SharedPtr node) |
| Generates a human-readable report of the check. | |
Base class for checking the state of a Lifecycle Node. Connects to the {node_name}/get_state service to verify the current state.
|
overrideprotectedpure virtual |
Prepares the check before execution.
| node | Shared pointer to the ROS 2 node. |
Derived classes can override this function to perform any necessary setup.
Reimplemented from system_health_check::base::SystemCheckBase.
|
inlineprotected |
Configuration for the check.
| target_node_name | Name of the lifecycle node (e.g., "/camera_driver") |
| expected_state_id | ID of the expected state (e.g., lifecycle_msgs::msg::State::PRIMARY_STATE_ACTIVE) |
| timeout_ms | Timeout in milliseconds |