|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
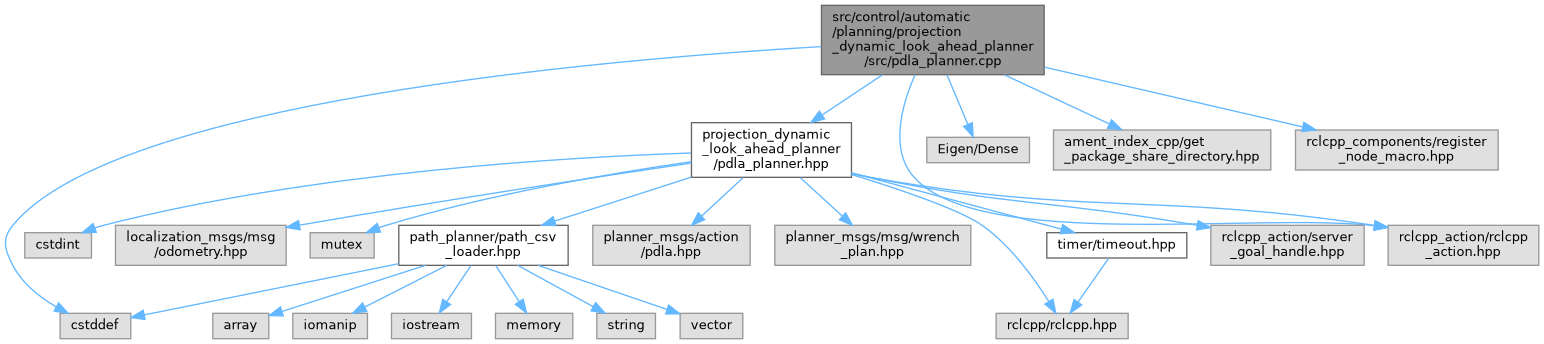
Tracking through the pass with Projection Dynamic Look-Ahead Planner (Action Server Ver.) More...
#include "projection_dynamic_look_ahead_planner/pdla_planner.hpp"#include <Eigen/Dense>#include <ament_index_cpp/get_package_share_directory.hpp>#include <cstddef>#include <rclcpp_action/rclcpp_action.hpp>#include "rclcpp_components/register_node_macro.hpp" Include dependency graph for pdla_planner.cpp:
Include dependency graph for pdla_planner.cpp:Namespaces | |
| namespace | planner |
| namespace | planner::pdla_planner |
Tracking through the pass with Projection Dynamic Look-Ahead Planner (Action Server Ver.)
ベクトル射影を用いた動的前方注視制御による経路追従 (ROS 2 Action Server)