|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
Publish string message to ros2 topic. More...
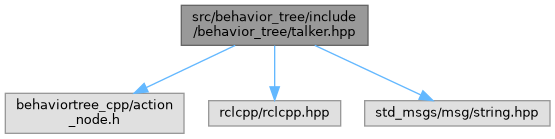
#include <behaviortree_cpp/action_node.h>#include <rclcpp/rclcpp.hpp>#include <std_msgs/msg/string.hpp> Include dependency graph for talker.hpp: This graph shows which files directly or indirectly include this file:
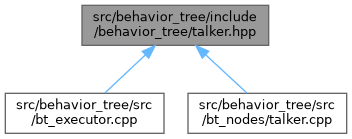
Include dependency graph for talker.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | behavior_tree::Talker |
| Action node to publish a string message to a ROS 2 topic. More... | |
Namespaces | |
| namespace | behavior_tree |
Publish string message to ros2 topic.
BehaviorTreeのポートから文字列を取得し、std_msgs::msg::StringとしてPublishする