|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
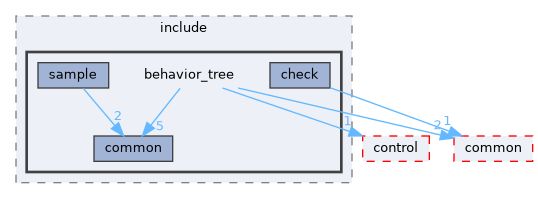
 Directory dependency graph for behavior_tree:
Directory dependency graph for behavior_tree:Directories | |
| directory | check |
| directory | common |
| directory | sample |
Files | |
| file | always_running.hpp [code] |
| Behavior Tree Node that always return running. | |
| file | filtered_logger.hpp [code] |
| file | find_pinger_action.hpp [code] |
| Action client for SBL (Find Pinger) | |
| file | lifecycle_manager.hpp [code] |
| lifecycle node manager | |
| file | qr_action.hpp [code] |
| Action client for QR tracking. | |
| file | reset_localization.hpp [code] |
| file | talker.hpp [code] |
| Publish string message to ros2 topic. | |
| file | update_mode.hpp [code] |
| Get mode from joy-controller. | |
| file | waypoint_action.hpp [code] |
| Action client for PDLA Planner. | |