|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
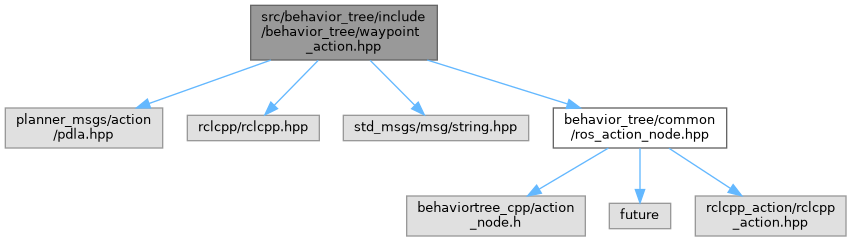
Action client for PDLA Planner. More...
#include <planner_msgs/action/pdla.hpp>#include <rclcpp/rclcpp.hpp>#include <std_msgs/msg/string.hpp>#include "behavior_tree/common/ros_action_node.hpp" Include dependency graph for waypoint_action.hpp: This graph shows which files directly or indirectly include this file:
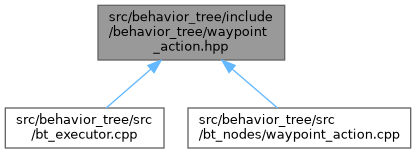
Include dependency graph for waypoint_action.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | behavior_tree::WaypointAction |
| Waypoint Action Client implementation using the CUSTOM RosActionNode template. More... | |
Namespaces | |
| namespace | behavior_tree |
Action client for PDLA Planner.
PDLA Action ServerにCSVパスを送り、経路追従を実行するBTノード