|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
Get mode from joy-controller. More...
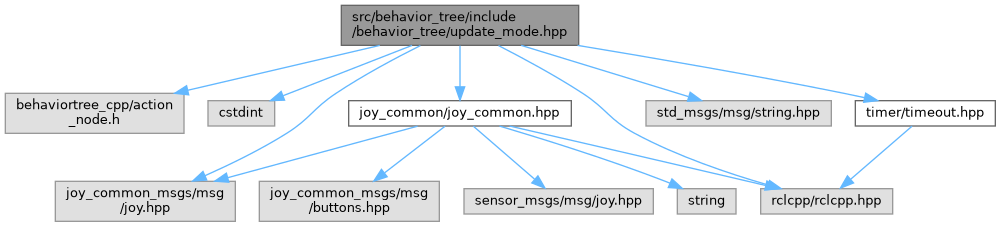
#include <behaviortree_cpp/action_node.h>#include <cstdint>#include <joy_common/joy_common.hpp>#include <joy_common_msgs/msg/joy.hpp>#include <rclcpp/rclcpp.hpp>#include <std_msgs/msg/string.hpp>#include <timer/timeout.hpp> Include dependency graph for update_mode.hpp: This graph shows which files directly or indirectly include this file:
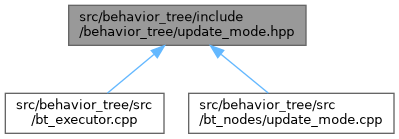
Include dependency graph for update_mode.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | behavior_tree::UpdateMode |
| Action node to update the robot's operation mode based on Joystick input. More... | |
Namespaces | |
| namespace | behavior_tree |
Get mode from joy-controller.
Joy-Controllerからボタンの情報を取得しmodeを更新する