|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
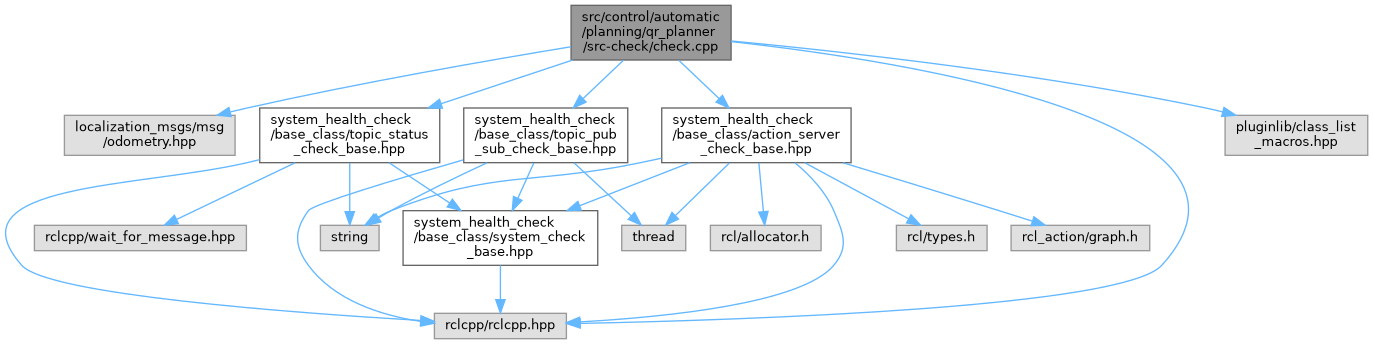
#include <localization_msgs/msg/odometry.hpp>#include <rclcpp/rclcpp.hpp>#include <system_health_check/base_class/action_server_check_base.hpp>#include <system_health_check/base_class/topic_pub_sub_check_base.hpp>#include <system_health_check/base_class/topic_status_check_base.hpp>#include <pluginlib/class_list_macros.hpp> Include dependency graph for check.cpp:
Include dependency graph for check.cpp:Classes | |
| class | planner::qr_planner::OdomTopicStatusCheck |
| class | planner::qr_planner::QRPlannerActionServerCheck |
Namespaces | |
| namespace | planner |
| namespace | planner::qr_planner |
Typedefs | |
| using | planner::qr_planner::Msg = localization_msgs::msg::Odometry |