|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
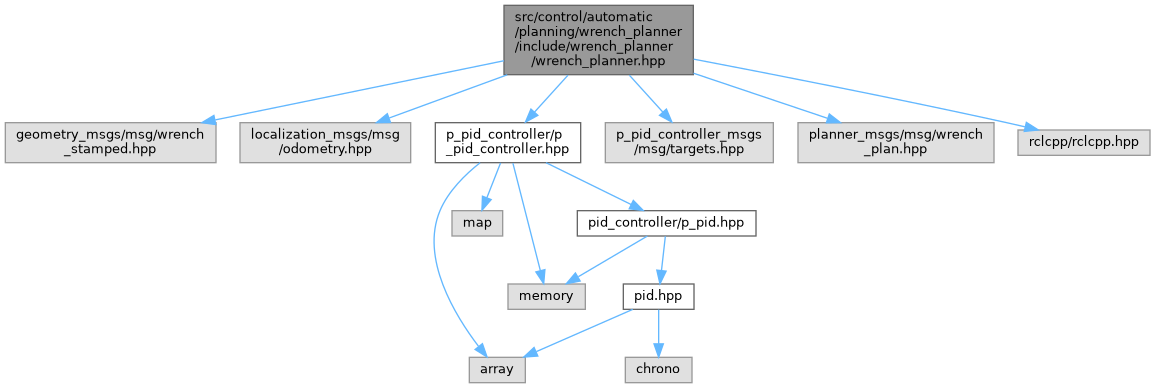
plan force and torque from path More...
#include <geometry_msgs/msg/wrench_stamped.hpp>#include <localization_msgs/msg/odometry.hpp>#include <p_pid_controller/p_pid_controller.hpp>#include <p_pid_controller_msgs/msg/targets.hpp>#include <planner_msgs/msg/wrench_plan.hpp>#include <rclcpp/rclcpp.hpp> Include dependency graph for wrench_planner.hpp: This graph shows which files directly or indirectly include this file:
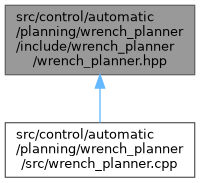
Include dependency graph for wrench_planner.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | planner::wrench_planner::WrenchPlanner |
Namespaces | |
| namespace | planner |
| namespace | planner::wrench_planner |
plan force and torque from path
pathからforceとtorqeを計画