|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
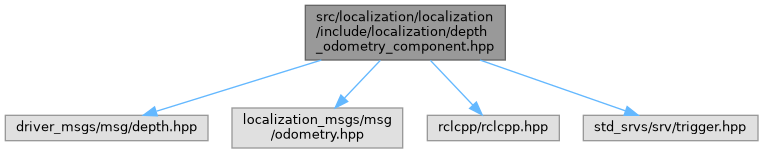
#include <driver_msgs/msg/depth.hpp>#include <localization_msgs/msg/odometry.hpp>#include <rclcpp/rclcpp.hpp>#include <std_srvs/srv/trigger.hpp> Include dependency graph for depth_odometry_component.hpp: This graph shows which files directly or indirectly include this file:
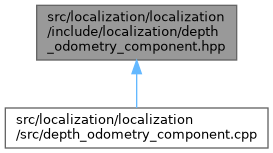
Include dependency graph for depth_odometry_component.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | localization::depth::DepthOdometry |
| Depth odometry class. More... | |
Namespaces | |
| namespace | localization::depth |
| localization | |
| namespace | localization |
| localization | |
Variables | |
| const float | localization::depth::EMA_ALPHA = 0.4 |
| parameter of Exponential Moving Average | |
| const int | localization::depth::DEPTH_SMA_SUMPLE_NUM = 32 |
| Number of TAP for simple moving average. | |
| const float | localization::depth::sea2fresh_scale = 1029.0 / 1000.0 |
| Convert to sea to fresh density. | |