|
| def | __init__ (self, RobotState state) |
| |
| def | cb_params (self, params) |
| |
| def | cb_dvl (self, msg) |
| |
| def | cb_depth (self, msg) |
| |
| def | cb_env (self, msg) |
| |
| def | cb_imu (self, msg) |
| |
| def | cb_power (self, msg) |
| |
| def | cb_sys_status (self, msg) |
| |
| def | cb_talker (self, msg) |
| |
| def | publish_switch_command (self) |
| |
| def | publish_imu_reset (self) |
| |
| def | publish_tilt_command (self) |
| |
| def | publish_led_command (self) |
| |
| def | update_topic_status (self) |
| |
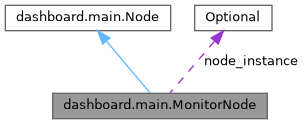
 Public Member Functions inherited from dashboard.main.Node Public Member Functions inherited from dashboard.main.Node |
| def | __init__ (self, name) |
| |
| def | declare_parameter (self, name, value) |
| |
| def | create_subscription (self, *args) |
| |
| def | create_publisher (self, *args) |
| |
| def | get_clock (self) |
| |
| def | add_on_set_parameters_callback (self, cb) |
| |
| def | destroy_node (self) |
| |
◆ __init__()
| def dashboard.main.MonitorNode.__init__ |
( |
|
self, |
|
|
RobotState |
state |
|
) |
| |
◆ _init_params()
| def dashboard.main.MonitorNode._init_params |
( |
|
self | ) |
|
|
protected |
◆ _init_subs_pubs()
| def dashboard.main.MonitorNode._init_subs_pubs |
( |
|
self | ) |
|
|
protected |
◆ _init_timers()
| def dashboard.main.MonitorNode._init_timers |
( |
|
self | ) |
|
|
protected |
◆ _is_remote_node_alive()
| bool dashboard.main.MonitorNode._is_remote_node_alive |
( |
|
self, |
|
|
str |
topic_name, |
|
|
str |
mode |
|
) |
| |
|
protected |
指定したトピックに相手がいるか確認する
:param topic_name: トピック名
:param mode: 'sub' (自分が受信側=相手はPub) or 'pub' (自分が送信側=相手はSub)
:return: 接続確認できればTrue
◆ _update_common()
| def dashboard.main.MonitorNode._update_common |
( |
|
self, |
|
|
SensorData |
data_obj, |
|
|
|
msg |
|
) |
| |
|
protected |
◆ cb_depth()
| def dashboard.main.MonitorNode.cb_depth |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_dvl()
| def dashboard.main.MonitorNode.cb_dvl |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_env()
| def dashboard.main.MonitorNode.cb_env |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_imu()
| def dashboard.main.MonitorNode.cb_imu |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_params()
| def dashboard.main.MonitorNode.cb_params |
( |
|
self, |
|
|
|
params |
|
) |
| |
◆ cb_power()
| def dashboard.main.MonitorNode.cb_power |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_sys_status()
| def dashboard.main.MonitorNode.cb_sys_status |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ cb_talker()
| def dashboard.main.MonitorNode.cb_talker |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ publish_imu_reset()
| def dashboard.main.MonitorNode.publish_imu_reset |
( |
|
self | ) |
|
◆ publish_led_command()
| def dashboard.main.MonitorNode.publish_led_command |
( |
|
self | ) |
|
◆ publish_switch_command()
| def dashboard.main.MonitorNode.publish_switch_command |
( |
|
self | ) |
|
◆ publish_tilt_command()
| def dashboard.main.MonitorNode.publish_tilt_command |
( |
|
self | ) |
|
◆ update_topic_status()
| def dashboard.main.MonitorNode.update_topic_status |
( |
|
self | ) |
|
◆ node_instance
| Optional dashboard.main.MonitorNode.node_instance = None |
|
static |
◆ pub_imu_reset
| dashboard.main.MonitorNode.pub_imu_reset |
◆ pub_led
| dashboard.main.MonitorNode.pub_led |
◆ pub_sys_switch
| dashboard.main.MonitorNode.pub_sys_switch |
◆ pub_tilt
| dashboard.main.MonitorNode.pub_tilt |
◆ state
| dashboard.main.MonitorNode.state |
The documentation for this class was generated from the following file:
- src/visualizer/dashboard/dashboard/main.py