|
Common
common packages for kyubic
|

|
|
Common
common packages for kyubic
|
|
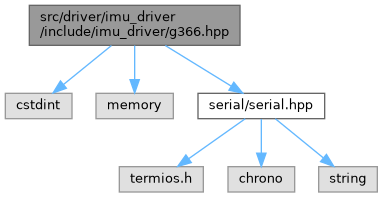
G366 library. More...
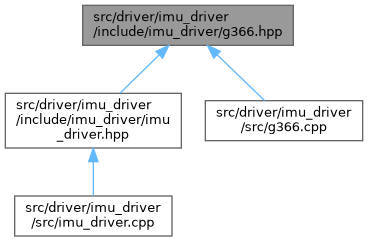
 Include dependency graph for g366.hpp: This graph shows which files directly or indirectly include this file:
Include dependency graph for g366.hpp: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| struct | driver::imu_driver::g366::DATA_META |
| Store meta data of G366. More... | |
| struct | driver::imu_driver::g366::DATA |
| Store data with modified type of G366. More... | |
| struct | driver::imu_driver::g366::RAW_DATA_T |
| Store raw data of G355. More... | |
| class | driver::imu_driver::g366::G366 |
| for 16bit attitude data [degree/LSB] More... | |
Namespaces | |
| namespace | driver::imu_driver |
| For imu driver. | |
| namespace | driver |
| namespace | driver::imu_driver::g366 |
Typedefs | |
| using | driver::imu_driver::g366::command = const unsigned char |
| Commands to configure the G366. | |
Variables | |
| command | driver::imu_driver::g366::window0_select_wcomm [3] = {0xFE, 0x00, 0x0d} |
| command | driver::imu_driver::g366::window1_select_wcomm [3] = {0xFE, 0x01, 0x0d} |
| Select Window 0. | |
| command | driver::imu_driver::g366::burst_request_wcomm0 [3] = {0x80, 0x00, 0x0d} |
| Select Window 1. | |
| command | driver::imu_driver::g366::config_mode_wcomm0 [3] = {0x83, 0x00, 0x0d} |
| Burst command (BURST Mode). Read data. | |
| command | driver::imu_driver::g366::sampling_mode_wcomm0 [3] = {0x83, 0x01, 0x0d} |
| Select configuration mode. | |
| command | driver::imu_driver::g366::diag_stat_rcomm0 [3] = {0x04, 0x00, 0x0d} |
| Select sampling mode. | |
| command | driver::imu_driver::g366::self_test_wcomm1 [3] = {0x83, 0x04, 0x0d} |
| Read Diagnostic status. | |
| command | driver::imu_driver::g366::self_test_rcomm1 [3] = {0x02, 0x00, 0x0d} |
| Self test command. | |
| command | driver::imu_driver::g366::software_reset_wcomm1 [3] = {0x8A, 0x80, 0x0d} |
| Read self test status. | |
| command | driver::imu_driver::g366::check_ready_rcomm1 [3] = {0x0A, 0x00, 0x0d} |
| Software reset command. | |
| command | driver::imu_driver::g366::filter_ctrl_wcomm1 [3] = {0x86, 0x00, 0x0d} |
| Read ready status. | |
| command | driver::imu_driver::g366::filter_ctrl_rcomm1 [3] = {0x06, 0x00, 0x0d} |
| Set Filter command. | |
| command | driver::imu_driver::g366::atti_motion_wcomm1 [3] = {0x96, 0x00, 0x0d} |
| Read set filter status. | |
| command | driver::imu_driver::g366::atti_motion_rcomm1 [3] = {0x16, 0x00, 0x0d} |
| Set attitude mortion profile. | |
| command | driver::imu_driver::g366::baud_rate_460_wcomm1 [3] = {0x89, 0x00, 0x0d} |
| Read set profile status. | |
| command | driver::imu_driver::g366::baud_rate_230_wcomm1 [3] = {0x89, 0x01, 0x0d} |
| Set baud rate (460800bps) | |
| command | driver::imu_driver::g366::baud_rate_921_wcomm1 [3] = {0x89, 0x02, 0x0d} |
| Set baud rate (230400bps) | |
| command | driver::imu_driver::g366::config_comm [33] |
| Set baud rate (921600bps) | |
| const int | driver::imu_driver::g366::default_baudrate = 460800 |
| const double | driver::imu_driver::g366::temp_sf = 0.00699411 |
| Default baudrate. | |
| const double | driver::imu_driver::g366::gyro_sf = 1.0 / 66.0 |
| for 16bit attitude data [degree celsius/LSB] | |
| const double | driver::imu_driver::g366::accel_sf = 1.0 / 4.0 |
| for 16bit gyro data [(degree/s)/LSB] | |
| const double | driver::imu_driver::g366::qtn_sf = 1.0 / (1 << 14) |
| for 16bit, output range ±8 acceleration data [(mG)/LSB] | |
| const double | driver::imu_driver::g366::atti_sf = 0.00699411 |
| for 16bit quaternion data [-/LSB] | |
G366 library.
IMU(G366) のデータを取得